Case Study using the PC-Crash Multibody Model
Application of the PC-Multibody Model for Motorcycle Accident Reconstruction
In my daily practice of accident reconstruction, I am finding the multibody model in PC-Crash increasingly valuable. Despite writing a book on motorcycle accident reconstruction, I regularly come across motorcycle crashes for which I have the thought: Wow, I don’t have a method for this one. The PC-Crash multibody has been the method that has been enabling me to move forward beyond that initial assessment. I still have a lot to learn with this model, and I haven’t come close to testing its limits, but it’s proven invaluable on numerous case. It enables me to consider the decoupled motion of the rider and the motorcycle and to examine specific contact points between the motorcycle/rider and a struck passenger vehicle. In other words, I can examine the collision on a component by component basis, or at least get closer to that than I have been able to before. This case study is an example of a case in which my analysis benefited from use of the PC-Crash multibody model.
This case involved the driver of a Volkswagen sedan attempting a left turn across the path of an approaching motorcyclist. A collision occurred between the passenger side of the Volkswagen and the motorcycle. Conditions at the time were dry, clear, and daylight. The speed limit for the motorcyclist was 30 mph. To conduct our analysis, Explico reviewed police photographs and bodycam footage to identify physical evidence from the crash. Physical evidence included debris and fluid from the collision, the rest positions of the Volkswagen and the motorcycle, damage to the vehicles, and a scrape on the roadway surface. The subject intersection was scanned with a Faro laser scanner.
The photographs below depict some of the damage to the Volkswagen. Damage to this vehicle from the crash included: tire transfer onto the right wrap-around extent of the front bumper fascia and right front wheel; sheet metal damage to the right front fender and door; a wheel imprint from the motorcycle at the transition between the right front fender and right front door; the right-side mirror was scraped and pushed back; damage to the right side A-pillar; scraping and material transfer along the right side of the vehicle, terminating near the rear of the vehicle. This vehicle was equipped with an event data recorder (EDR) that would likely have recorded data from this crash. However, investigating officers had not imaged this data, and the vehicle was not available for inspection by Explico.


The photographs below depict the damage to the motorcycle. Damaged components included the front wheel/tire, fender, and fork tubes. This motorcycle was equipped with a conventional motorcycle braking system in which the front and rear brakes were actuated independently. This motorcycle was not equipped with antilock brakes (ABS). The bodycam footage from investigating officers showed that the headlight of the motorcycle was functioning and ON immediately after the crash.


To prepare a diagram of the evidence, Explico conducted photogrammetric analysis on several scene photographs and bodycam video frames. Once the evidence was documented and diagrammed, Explico used an accident analysis software package called PC-Crash to simulate the subject collision and the motion of the involved vehicles in the moments leading up to the collision. The driver of the Volkswagen testified that he remembered “pulling out and stopping a little bit in the intersection.” He then waited for approaching traffic to pass and a pedestrian who was crossing the street. When the pedestrian cleared the intersection, he initiated his turn and did not see the approaching motorcyclist. Published, real-world data shows that left turning drivers typically reach a peak lateral acceleration during a left turn of 0.315 ± 0.071 g.
We simulated the Volkswagen starting from a stop “a little bit in the intersection.” A longitudinal acceleration of approximately 0.17 to 0.18 g resulted in the Volkswagen reaching a lateral acceleration during the turn of just over 0.3g. This simulation resulted in the conclusion that the Volkswagen would have been traveling approximately 17 mph at the time of the collision. For analysis of the collision, we used the multibody model in PC-Crash. The motorcycle and rider model for these simulations are depicted in the graphic below along with the Volkswagen model. With this model, we ran a series of simulations, varying the speed of the motorcycle. We found that an impact speed of approximately 24 mph for the motorcycle resulted in a simulation consistent with the physical evidence. A series of screen captures from this simulation are included below, which show the impact configuration between the vehicles, the rest positions of the vehicles, and the progression of the motion as the motorcycle and rider interact with the passenger side of the Volkswagen.







One question that came up in presenting this analysis was why the motorcycle rotated counterclockwise rather than clockwise. The contention was that the velocity direction of the Volkswagen should generate a clockwise rotation of the motorcycle rather than a counterclockwise rotation. To support this contention, another reconstructionist presented the following images of a crash test from the 2016 ARC-CSI conference. This crash test resulted in clockwise rotation of the motorcycle. Unfortunately, this crash test is not similar to the subject collision. One fundamental difference is the impact angle between the motorcycle and the car in this test versus the angle between the motorcycle and car in the subject collision. In this test, the impact angle was approximately 90 degrees. In the subject collision, the impact angle between the motorcycle and the Volkswagen was approximately 135 degrees.

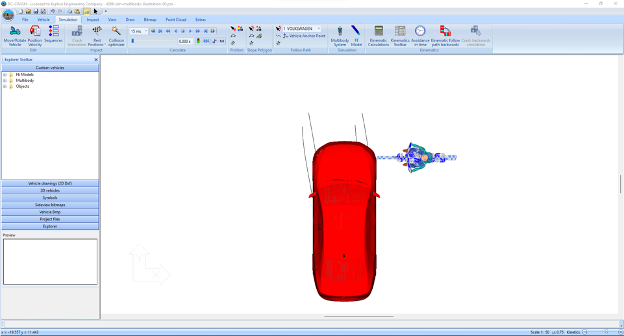
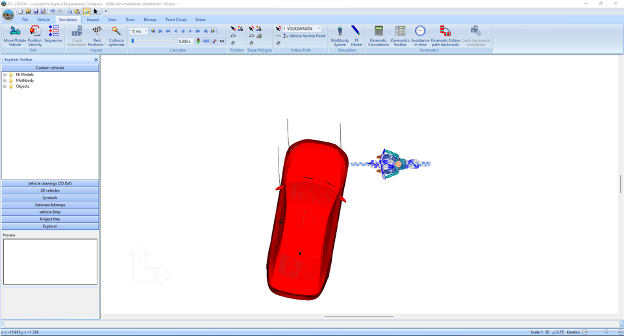
To illustrate the significance of the impact angle, we ran a series of simulations with the PC-Crash multibody model. For these simulations, we utilized an initial speed for the Volkswagen of 17.5 mph and a speed for the motorcycle of 24 mph. We simulated a collision occurring between the front of the motorcycle and the right front corner of the Volkswagen and varied the impact angle. We started with an impact angle of 90 degrees, similar to the angle in the crash test. The first graphic below is a screen capture from PC-Crash showing the starting positions for this first illustrative simulation. Then, the second graphic shows the positions of the vehicles 100 milliseconds into the simulation. As this graphic shows, this collision resulted in the motorcycle rotating clockwise with the left side of the motorcycle coming into contact with the right side of the Volkswagen. This is consistent with the crash test.

Next, we ran a similar simulation but changed the impact angle to 100 degrees. The screen captures below show the starting positions for the vehicles in this simulation and the vehicle positions 100 milliseconds into the simulation. Again, the motorcycle rotates clockwise, but the rate of this rotation is less than in the prior simulation.
Next, we ran a simulation with an impact angle of 110 degrees. The screen captures below show the starting positions for the vehicles in this simulation and the vehicle positions 100 milliseconds into the simulation. Again, the motorcycle is beginning to rotate clockwise, but the rate of this rotation is significantly slower than in the prior simulations.
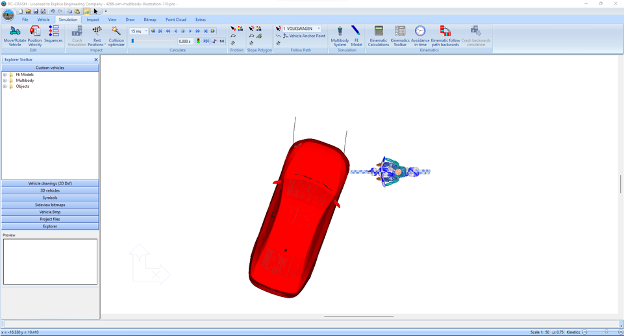
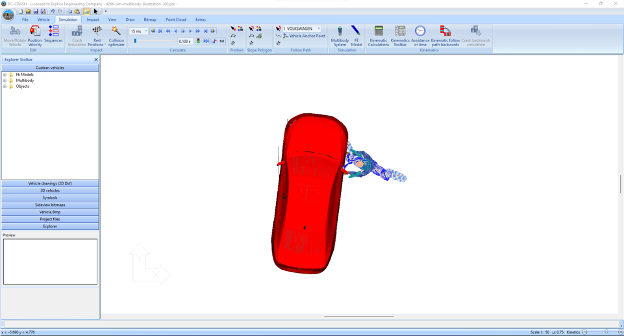
Finally, we ran a simulation with an impact angle of 120 degrees. The screen captures below show the starting positions for the vehicles in this simulation and the vehicle positions 100 milliseconds into the simulation. This time, the motorcycle rotates counterclockwise, and the right side of the motorcycle contacts the Volkswagen. This is like what occurred in the subject collision and illustrates that the crash test is not similar to the subject collision.

