Case Study: Reconstructing Vegetation and Sight Lines Using Camera Matching
Summary
Often, questions arise on our cases related to the sight distance a driver had available in the moments leading up to a collision. This is relevant to a driver’s ability to avoid a crash. When these question arise, it may not be sufficient to simply inspect the site and measure the sight distance in the field because changes to vegetation could have occurred between the date of the crash and the date of our inspection. In this case study, we give an example of how we can reconstruct the shape and location of vegetation based on the on-scene police photographs and measure the available sight lines.
Introduction
Nathan Rose and Connor Smith of Explico investigated and reconstructed an intersection collision in Washington involving three vehicles – a Chrysler Voyager minivan (Unit 1), a Hyundai Elantra sedan (Unit 2), and a Ford Edge sport utility vehicle (Unit 3). According to the Police Traffic Collision Report (TCR), the Chrysler minivan was traveling northbound towards the subject intersection. The Hyundai sedan was sitting stopped at the subject intersection, facing northbound and preparing to turn left, waiting for oncoming traffic to pass. The Chrysler struck the rear of the Hyundai and pushed it into the oncoming lane where it was struck on the passenger’s side by the front of the southbound Ford SUV. This basic sequence is depicted in Figure 1, which is a diagram that was included in the TCR. The speed limit in the area was 55 mph. In this case, two of the involved vehicles were equipped with event data recorders (EDRs). However, the investigating officers did not download this data and the vehicles were destroyed prior to Explico’s involvement. Thus, EDR data was not available for use in this reconstruction.
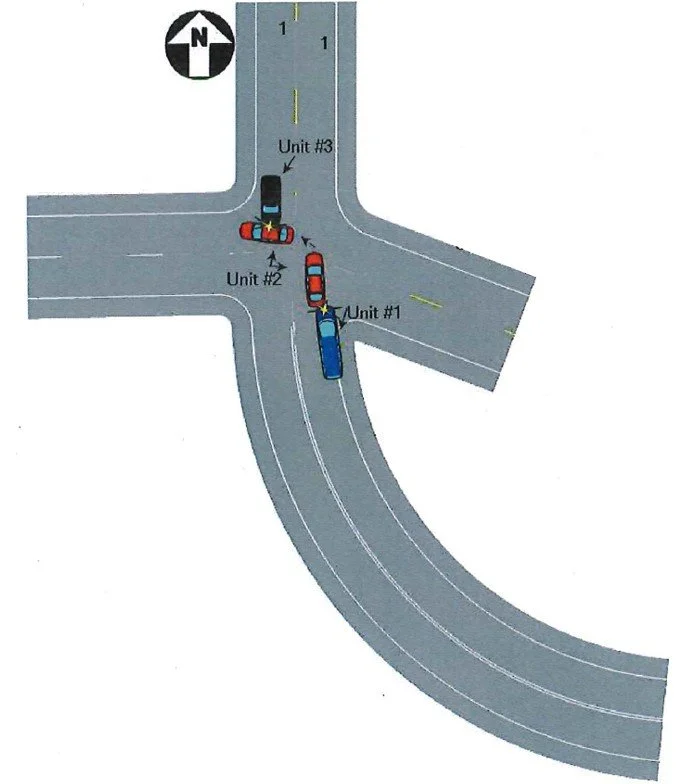
Figure 1 – Collision Sequence Diagram from TCR
Initial statements of the driver of the Chrysler minivan were inconsistent with the sequence described by the TCR. In his written statement, this driver indicated that he was traveling northbound at 55 mph when the car in front of him abruptly turned its left turn signal on. He continued: “I slammed on brakes and ended up rear ending them.” In video footage from responding officers’ vehicles, the driver of the Chrysler stated, “I was going down the road and the person that was in front of me put their turn signal on suddenly. I slammed on my brakes, and I didn’t have time to stop. I rear ended them, and then they flipped in front of the other car that was in the other direction.”
Later, in his deposition testimony, the driver of the Chrysler minivan testified inconsistent with these initial statements. He also made inconsistent statements during the deposition. He testified that “I came around a corner, and somebody had their brake lights on and put their turn signal on at the last second, and I rear-ended them.” Then he stated that he observed the Hyundai’s brake lights come on. After he observed the brake lights come on, he then observed the turn signal come on. In response to a question related to how far behind the Hyundai he was, he stated: “I know it wasn’t that far because I would have been able to stop in time.” He then stated: “I wasn’t following her…I didn’t see her car. That’s what I’m getting at. The sight line didn’t account me to be able to see her car.” He was not able to say if the Hyundai was stopped when he struck it.
One of the issues in this case was whether or not the available sight distances approaching the intersection were adequate for the driver of the Chrysler minivan to avoid colliding with the Hyundai. The conflicting statements by the driver of the Chrysler minivan led us to consider two possible scenarios of what occurred in the moments leading up to the collision. In the first scenario, the driver of the Chrysler was driving behind the Hyundai as it began to slow. This scenario would put the Hyundai in view during the entire approach to the intersection. In the second scenario, the Hyundai was fully stopped and preparing to turn during the entire approach of the Chrysler to the intersection.
Site Inspection and Mapping
Connor Smith and Nathan Rose inspected, mapped, and photographed the area of the subject collision. In mapping the site, they used a FARO laser scanner and a DJI Mavic 2 Pro small Unmanned Aerial System (sUAS, aka drone). For the aerial mapping, GPS-enabled Propeller Aeropoints were placed at the site as ground control. After the site inspection, they utilized Pix4D Mapper photogrammetry software to generate a three-dimensional map and point cloud of the crash site using these aerial photographs. This data was supplemented with the three-dimensional point cloud generated with the FARO laser scanner. This process produced millions of georeferenced measurements. Figure 2 is a drone photograph showing the area of the collision. This photograph looks south from the intersection. The Chrysler and the Hyundai would have initially been traveling from top to bottom on this photograph, towards the viewer. Figure 3 is an image showing the mapping data generated as a result of this site inspection. This image looks northbound along the direction the Chrysler would have been traveling while approaching the intersection.

Figure 2 – Aerial Photographs from Site Inspection

Figure 3 – Mapping Data Generated from Site Inspection
Physical Evidence Analysis
Nathan Rose and Connor Smith were provided with on-scene photographs taken by the investigating officers, which depicted physical evidence from the crash and the rest positions of the vehicles. These photographs showed that the Chrysler minivan exhibited collision damage to the front end. Approximately ¼ of the front end of the vehicle was damaged, concentrated on the left front. This damage demonstrated that the left ¼ of the Chrysler engaged with the rear of the Hyundai. The frontal impact airbags of the Chrysler deployed as a result of the collision. The on-scene photographs also demonstrated that the Hyundai exhibited collision damage to the right rear corner and to the passenger’s side. The damage to the right rear corner was caused by the collision from the Chrysler, and approximately ¼ of the rear end was damaged. The impact to the passenger’s side engaged and/or damaged components including the right front wheel, the right front fender, the passenger side doors, the a-pillar, the b-pillar, and the roof. The side curtain airbags on the right side deployed. The Ford SUV exhibited collision damage to the front end from colliding with the passenger’s side of the Hyundai. The airbags on this vehicle deployed.
Sight Line Analysis
The driver of the Chrysler Voyager gave conflicting statements and testimony regarding what occurred in the moments leading up to the subject collision. His written statement and the statements he initially made to the investigating officers imply that he was following behind the Hyundai when he witnessed the Hyundai’s turn signal come on. He also indicates he applied heavy braking to avoid the Hyundai, so presumably he also observed the Hyundai slowing and was responding to that. His deposition testimony indicates he also observed the brake lights of the Hyundai. The characterization by the driver of the Chrysler that he came around the curve and saw the Hyundai stopped in the road did not come until later. Considering these inconsistent statements, Nathan Rose and Connor Smith evaluated the sight distances available to drivers approaching the subject intersection from the south. This evaluation of the sight distances was not from a traffic engineering perspective. Rather, they examined the sight distances in relationship to the causation of the subject crash.
To evaluate the sight distance present at the time of the subject crash, it was important to first locate and quantify the size of the vegetation that was present on the day of the crash (as opposed to at the time of our inspection). To reconstruct the vegetation present at the time of the crash, Nathan Rose and Connor Smith conducted photogrammetric analysis on some of the on-scene photographs. Photogrammetry is the process of obtaining accurate, three-dimensional measurements and object locations from photographs. The specific technique that we used in this case is referred to as camera-matching. This technique involved the following steps:
1. We imported our mapping data of the subject roadway into computer-modeling software.
2. We created a computer-modeled camera to view the mapping data from a perspective similar to that shown in each photograph being analyzed.
3. Each photograph was then imported into the software and designated as a background image for the corresponding computer-modeled camera.
4. Adjustments were then made to the location, focal length, and viewing plane of the computer-modeled cameras until an overlay was achieved between the mapping data and the scene shown in the photographs. When this overlay was achieved, the location and characteristics of the camera used to take each photograph had been reconstructed.
5. Once the camera locations and characteristics were known, the vegetation shown in each photograph could be located and sized.
This technique is widely used and accepted by accident reconstructionists. The series of images in Figure 4 through 6 shows sample results from this camera-matching process. Figure 4 shows one of the on-scene police photographs from the day of the crash that we analyzed, with the lens distortion having been removed. Figure 5 shows this same photograph aligned with the scene mapping data that we collected at the site. Figure 6 shows the vegetation located and correctly sized based on what is shown in the photograph. The specific vegetation of interest in this case was located on the right side of this photograph. In Figure 6, our reconstructed location and sizing of this vegetation is depicted with the muted dark shading on the right side of the photograph. Comparison of Figures 5 and 6 reveals that this vegetation was smaller on the day of the crash than on the day of Explico’s inspection.

Figure 4 – On-Scene Photograph with Lens Distortion Removed

Figure 5 – On-Scene Photograph with the Scene Mapping Data Overlaid

Figure 6 – Reconstruction of Vegetation
We used this analysis to create a computer model of the scene with the vegetation sized accurately for the day of the subject collision. We then placed a computer model of the Hyundai in an area within our scene model that would be consistent with where a vehicle would stop to make a left turn. We then used a camera within our computer modeling software to view the approach to the intersection from the south. The camera was placed in a position to reasonably represent the eye position of the Chrysler driver, though small variations in the camera position would not significantly influence the results. This analysis resulted in the conclusion that, if the Hyundai was sitting stopped waiting to turn left as the Chrysler approached, then the vehicle would come partially into view when the Chrysler driver was approximately 675 feet away and fully into view when he was approximately 610 feet away.
Avoidance Analysis
To evaluate the Chrysler driver’s ability to avoid this collision, Nathan Rose and Connor Smith analyzed the following two pre-collision scenarios: 1) a scenario in which he was driving behind the Hyundai as it began to slow; and 2) a scenario in which the Hyundai was stopped at the intersection for an extended period while the Chrysler approached from the south. We evaluated these scenarios in PC-Crash using reasonable and realistic inputs.
In evaluating the first scenario, we assumed that the Hyundai was initially traveling 55 mph and that it decelerated at a rate of approximately 0.4g as it approached the intersection. The Hyundai stopped prior to being impacted by the Chrysler. In accordance with the Chrysler driver’s statements, we used an initial speed of 55 mph for the Chrysler and a deceleration of approximately 0.64g for pre-collision braking. We developed this scenario with the Chrysler decelerating to 45 mph at impact. This speed was obtained from our speed analysis, which is not covered in this case study write-up. This resulted in the conclusion that the Chrysler was approximately 58 feet from the collision when the driver began braking. In this scenario, the driver of the Chrysler begins braking nearly 6 seconds after the Hyundai begins slowing. This represents a significant delay in the Chrysler driver’s response to the slowing Hyundai.
We next developed a variation on this scenario in which the Chrysler braked to 35 mph and the Hyundai braked to 10 mph at impact. This resulted in the conclusion that the Chrysler driver was approximately 100 feet from the collision when he began braking. In this scenario, the Chrysler driver began braking nearly 4 seconds after the Hyundai driver began braking. This too represents a significant delay in the Chrysler driver’s response.
For the second scenario, in which the Hyundai was stopped for a lengthy period prior to the collision, it would still be true that the Chrysler driver was approximately 58 feet from the collision when he began braking. This is true even though he would have had at least 610 feet of available sight distance. Thus, under this scenario, the Chrysler driver would have driven for approximately 552 feet with the Hyundai in view without taking any action to avoid her vehicle. These 552 feet equate to nearly 7 seconds with the vehicle in view while the Chrysler driver took no action. Thus, both scenarios result in the conclusion that the Chrysler driver was significantly delayed in his response to the Hyundai, and this delay was not related to the sight distance.
To illustrate these findings, we produced animations to illustrate the sight distances and the ability of the Chrysler driver to avoid the impact. The first animation below shows the analysis scenario in which the Chrysler was directly behind the Hyundai and the Chrysler slowed to 10 mph in the same time the Hyundai slowed to 35 mph. The second animation below shows the analysis scenario in which the Chrysler was directly behind the Hyundai and the Chrysler slowed to 0 mph in the same time the Hyundai slowed to 45 mph. The third animation below shows the scenario in which the Hyundai is stopped during the entire approach of the Chrysler. The Chrysler slows to 45 mph by the time of impact. The fourth animations below shows an avoidance scenarios in which we show that the Chrysler could have avoided by braking to a stop.